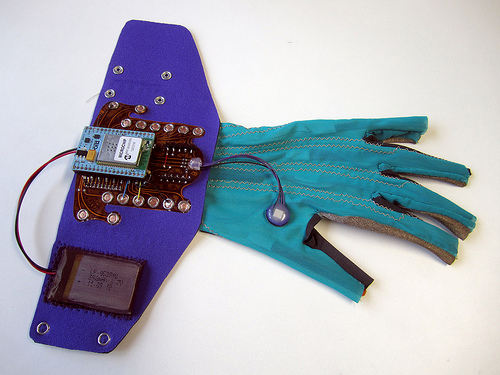
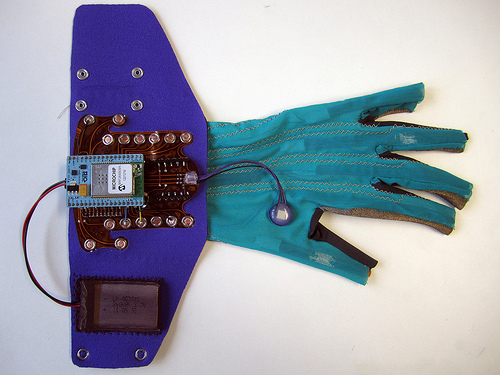
“Mega-Gluvs” V1
Documentation of maga-gloves creation with Rachel Freire!
Features
- x-OSC
- flex circuit breakout board
- snap connectors
- 8 commercial flex sensors
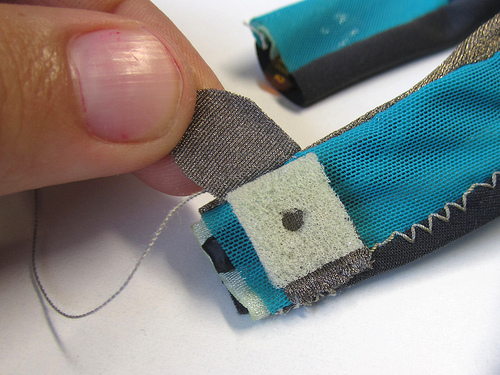
- 8 e-textile bend sensors (three of which double as soft pushbuttons)
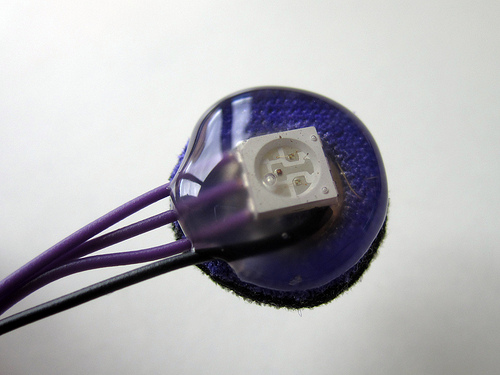
- 1 RGB LED
- 2 vibration motors
Evaluation/Testing
Processing code >> https://github.com/plusea/CODE/tree/master/PROJECT%20CODE/Gloves/xOSC%20Gloves/Processing/TheGlovesProject_megaGlove
Video:
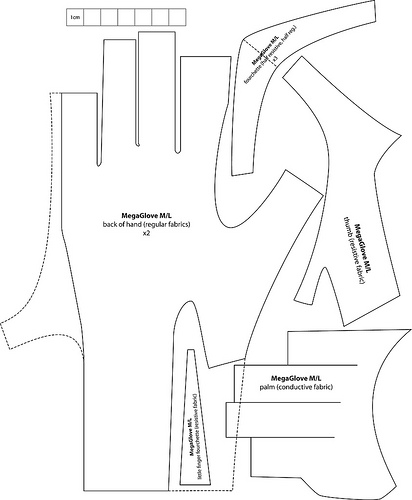
Fabric Pattern and Circuit
Ideas for solving the e-textile circuit:
- Use shorter flex sensors, orientate slightly diagonally and secure in enclosed pockets, like in Cyberglove design
- Use e-textile sensors and flex-sensors and voltage dividers!
- …
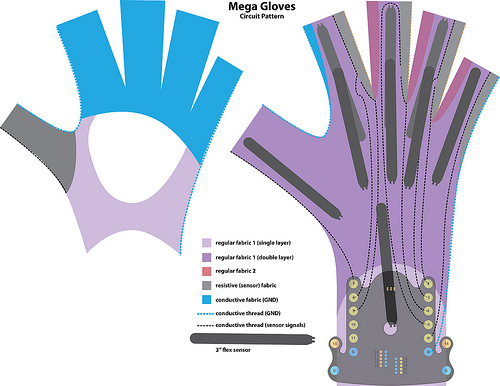
Hannah’s Second Version of Fourchette Pattern
Some issues I see arising:
- the fourchettes do such a great job of relieving any stress on the fabric between the fingers, that i’m not sure the e-textile sensors on the hand-kunuckle joints will work comparatively well to previous version. also, now resistive fabric is on side of finger and not on palm so is less compressed through finger bend.
- having palm be exposed conductive fabric, and sensor lines are also exposed conductive thread, so if these touch directly then we are shorting sensors out. not necessarily a bad thing. just that we wanted to use this mechanism for the button presses, so would not want to have it trigger buttons accidentally.
- lines sewn for e-textile sensors are currently doubling as pocket boundaries for flex sensors. because of this not sure flex sensors will fall into perfect places.
- design is starting to look very sporty. i wonder if we can re-introduce some things (fabric, shape….) to make it look a bit more “elegant”, sci-fi and/or unusual.
With flex sensors front and back:

LED in hot glue:

Soft switch:

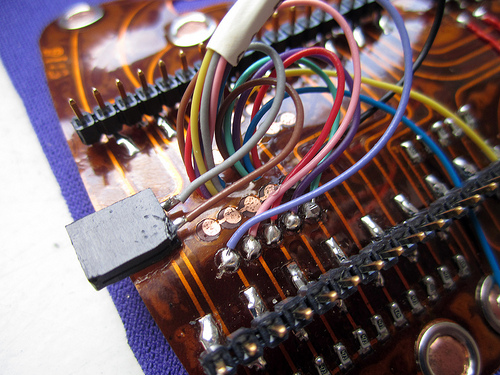
Flex sensor wiring and soldering:
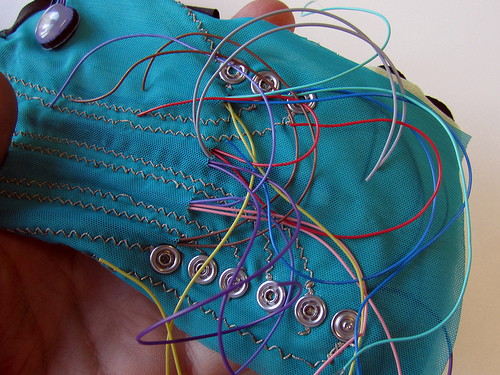
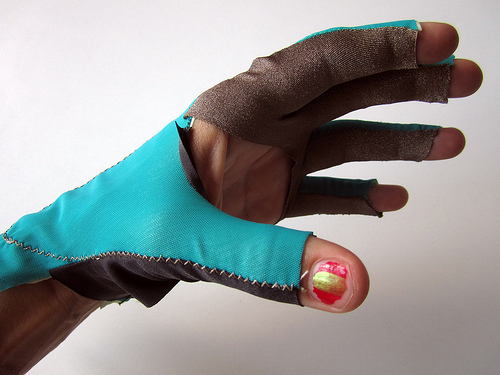
Just fabric and e-textile sensors:



Rachel’s First Version of Fourchette Pattern




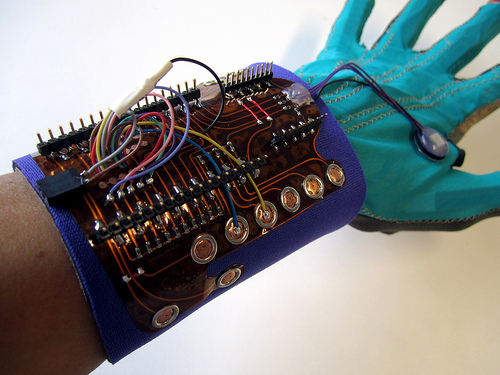
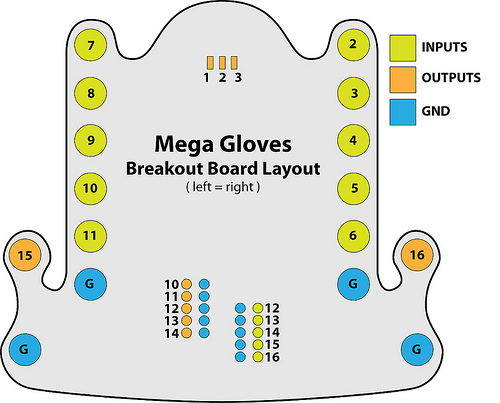
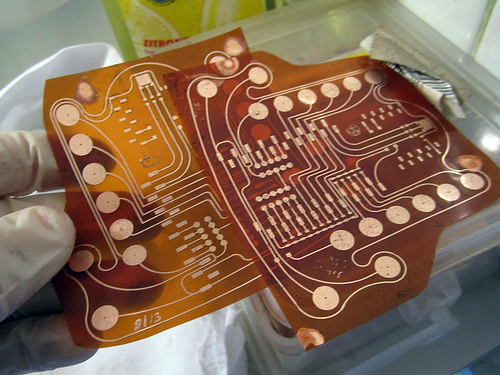
Flex Breakout Board
Wiring of Left Hand (Version: FourchetteV2_hannah:
Outputs:
1 - LED green
2 - LED red
3 - LED blue
4-9 - not in use, and not broken-out
10-14 - broken-out, but not in use
15 - left motor
16 - right motor
Inputs:
number on board [osc number] — (confusing!)
1 [0] - flex: little (brown)
2 [1] - e-textile: thumb
3 [2] - e-textile: index FK
4 [3] - e-textile: index HK
5 [4] - flex: thumb (yellow)
6 [5] - flex: index HK (blue)
7 [6] - e-textile: little
8 [7] - e-textile: ring HK
9 [8] - e-textile: ring FK
10 [9] - e-textile: middle HK
11 [10] - e-textile: middle FK
12 [11] - flex: index FK (green)
13 [12] - flex: middle HK (dark purple)
14 [13] - flex: middle FK (red)
15 [14] - flex: ring HK (pink)
16 [15] - flex: ring FK (light purple)
X [x] - flex: wrist (gray)
wire colours:
1 thumb - yellow
2 index HK - blue
3 index FK - green
4 middle HK - dark purple
5 middle FK - red
6 ring HK - pink
7 ring FK - light purple
8 little - brown
9 wrist - gray
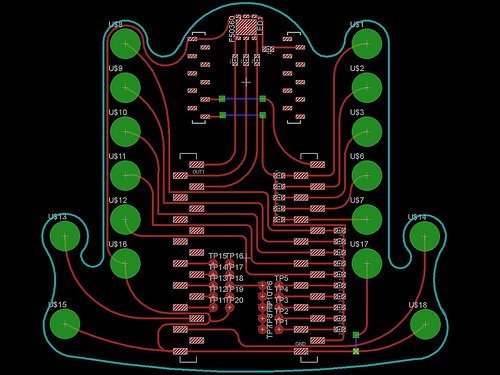
Eagle stuff:
Eagle PCB files >> https://github.com/plusea/EAGLE/tree/master/projects/Gloves
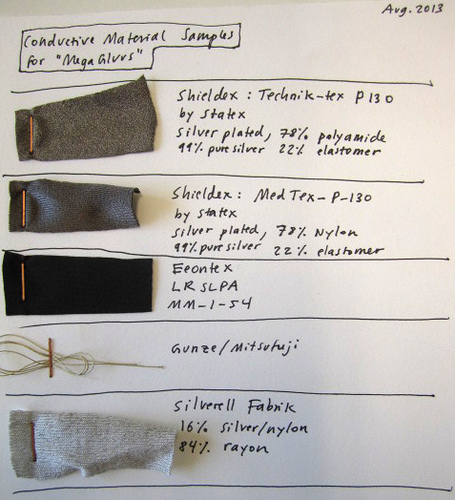
Materials and Parts
- Eeontex piezoresistive fabric (piezo-resistive effect) LR SLPA MM-1-54 >> http://eeonyx.com/
- Shieldex silver plated lycra MedTex 130 >> http://www.shieldextrading.net/pdfs/Medtex%20130.pdf
- Mitsufuji silver conductive thread (not for retail) >> look into gold plated thread (tarnish proof!)
- Flexpoint flex sensors >> http://www.flexpoint.com/companyInfo/bendSensor.htm
- RBG LED >>
- SMD resistors
- SND JST socket >>
- Two SMD low-profile male header; Part number: TSM-118-04-F-SV. Available from Toby Electronics (www.toby.co.uk/)
- Power switch >>
Leave a Reply