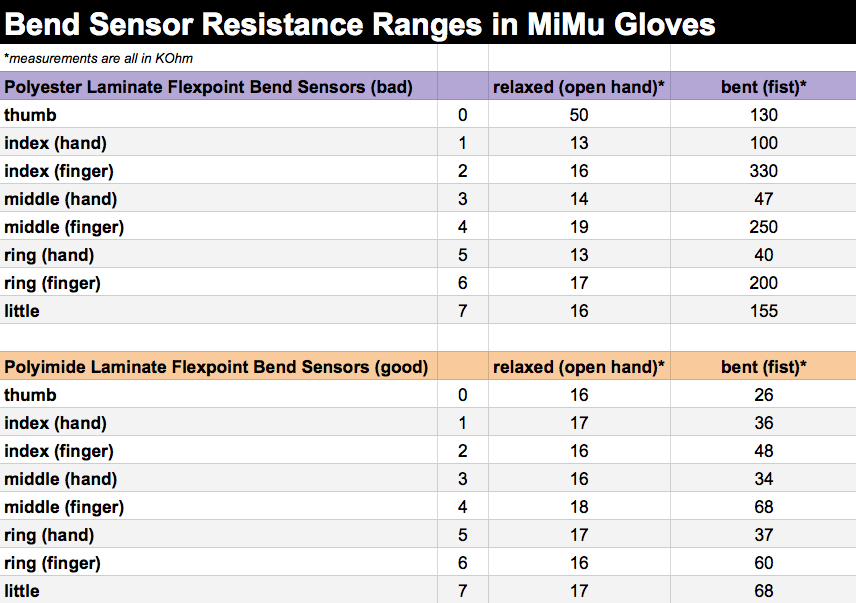
Bend Sensor Resistance Ranges
Measurements taken on left hand of MiMu NIME glove, once with (bad) polyester sensors and once with (good) polyimide sensors.
Conclusion….
For polyimide sensors in Collaborator Gloves we should pick pull-up resistors that optimize the following resistance ranges:
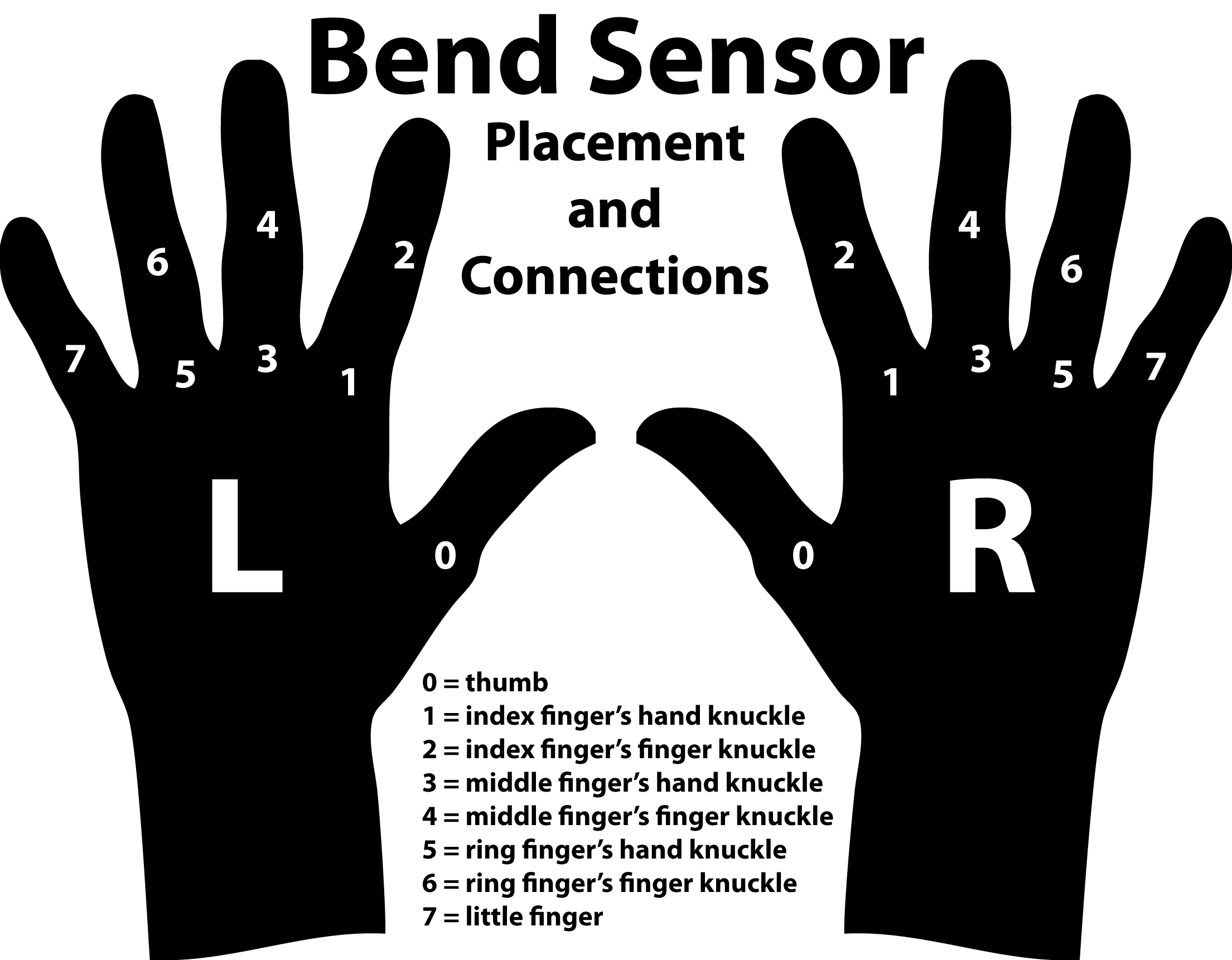
Thumb [0]: 16 - 26K Ohm
Hand Knuckles (index, middle, ring) [0]: 16 - 37K Ohm
Finger Knuckles (index, middle, ring) [0]: 16 - 68 K Ohm
Little Finger [7]: 16 - 68K Ohm
Spreadsheet on Google Drive >> https://docs.google.com/spreadsheets/d/1WtN8FPhmPiIvAymysiFhFChnqm8S9AQhyk2NQnAv-qU/edit#gid=0
Leave a Reply